Artikelannahme bei GCPR 2023
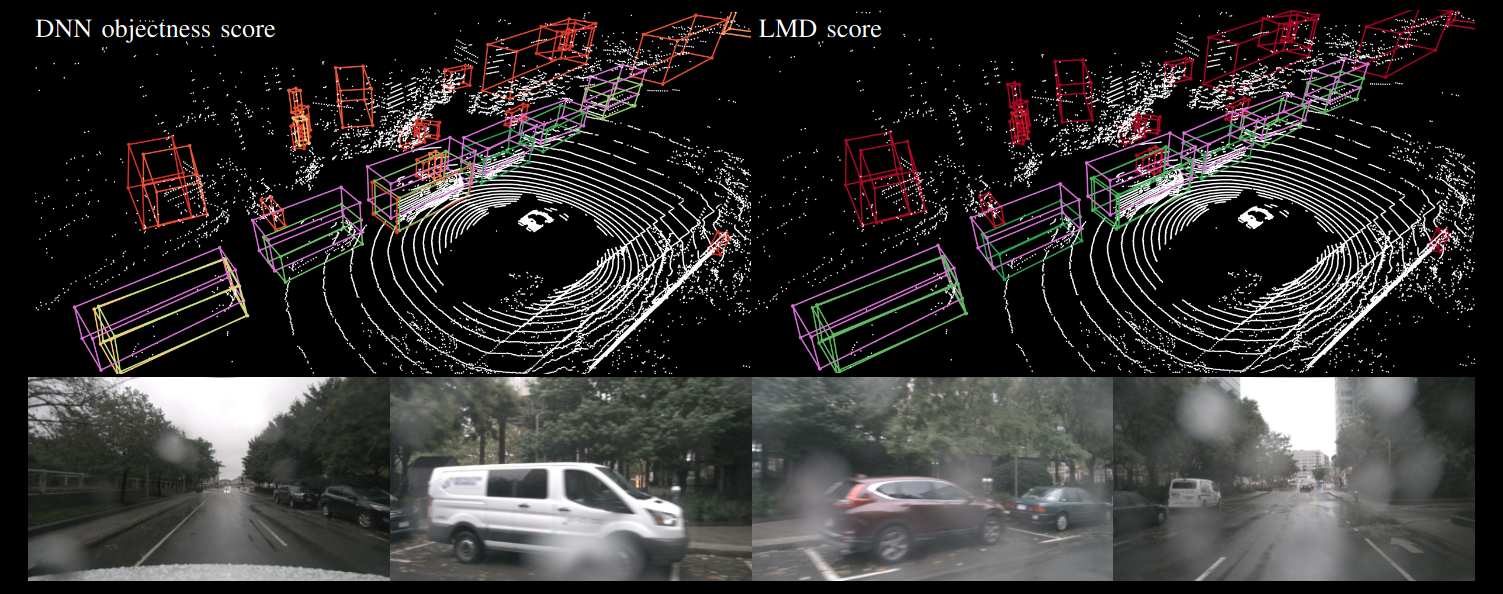
Objekterkennung auf Basis von Lidar-Punktwolkendaten ist eine vielversprechende Technologie für autonomes Fahren und Robotik, die in den letzten Jahren einen bedeutenden Leistungs- und Genauigkeitsanstieg erlebt hat. Insbesondere ist die Unsicherheitsschätzung eine entscheidende Komponente für nachgelagerte Aufgaben, und tiefe neuronale Netzwerke bleiben selbst bei Vorhersagen mit hoher Zuversicht fehleranfällig. Früher vorgeschlagene Methoden zur Quantifizierung von Vorhersageunsicherheiten neigen dazu, das Trainingsschema des Detektors zu verändern oder sich auf Vorhersage-Stichproben zu verlassen, was zu deutlich erhöhten Inferenzzeiten führt. Um diese beiden Probleme anzugehen, schlagen wir LidarMetaDetect (LMD), ein leichtgewichtiges Nachbearbeitungsverfahren zur Einschätzung der Vorhersagequalität, vor. Unsere Experimente zeigen eine signifikante Erhöhung der statistischen Zuverlässigkeit bei der Trennung von wahren und falschen Vorhersagen. Wir schlagen eine zusätzliche Anwendung unserer Methode vor, die zur Erkennung von Annotierungsfehlern führt. Explizite Proben und eine konservative Zählung von Vorschlägen für Annotierungsfehler deuten auf die Durchführbarkeit unserer Methode für umfangreiche Datensätze wie KITTI und nuScenes hin. Unser Preprint ist verfügbar unter arxiv.org/pdf/2306.07835.pdf.