ICCV2025 Paper angenommen
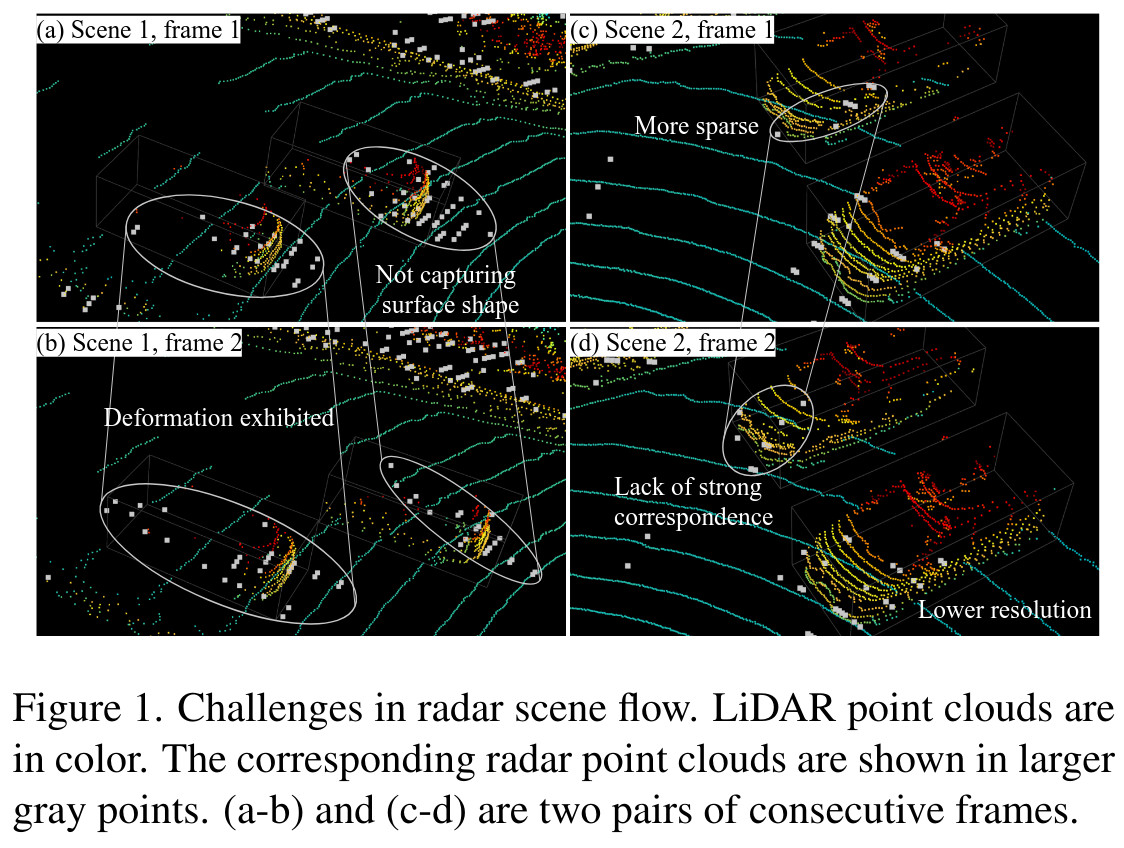
Der sogenannte „Scene Flow“ liefert entscheidende Bewegungsinformationen für das autonome Fahren. Neuere LiDAR scene flow Modelle verwenden die Annahme der starren Bewegung auf Instanzebene, wobei davon ausgegangen wird, dass die Objekte starre Körper sind. Diese Methoden auf Instanzebene sind jedoch für spärliche Radar-Punktwolken nicht geeignet. TARS modelliert den Radarszenenfluss hierarchisch und nutzt die Bewegungsstarrheit eher auf der Ebene des Verkehrsflusses.
Der Preprint ist hier zu finden: arxiv.org/pdf/2503.10210
Herzlichen Glückwunsch Jialong Wu, was für eine Leistung!