ICCV2025 Paper Acceptance
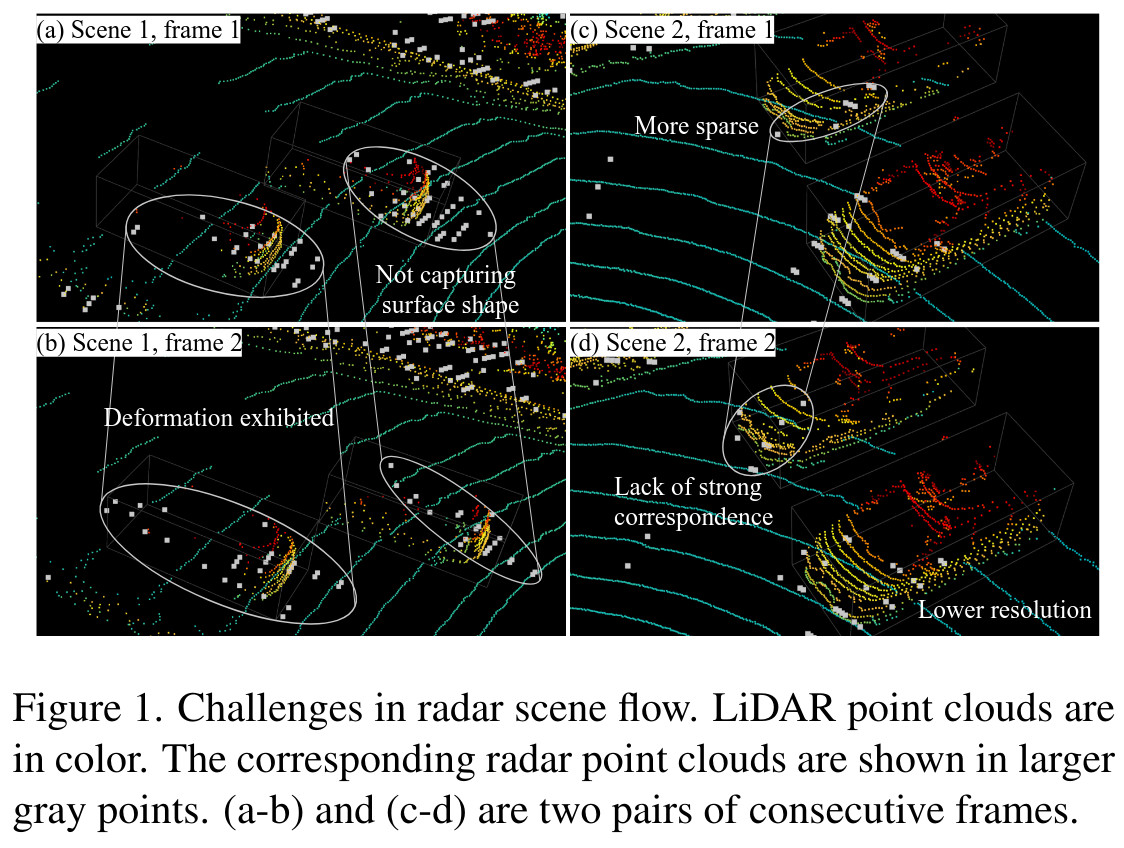
Scene flow provides crucial motion information for autonomous driving. Recent LiDAR scene flow models utilize the rigid-motion assumption at instance level, assuming objects are rigid bodies. However, these instance-level methods are not suitable for sparse radar point clouds. TARS hierarchically models Radar scene flow and utilizes the motion rigidity rather at traffic flow level.
The preprint can be found here: https://arxiv.org/pdf/2503.10210
Congrats Jialong Wu, what an achievement!